前言
由于我是从事医疗行业软件开发的,所以必不可少的会和图像打交道,最近刚刚好在做一个图像旋转相关的功能,借此又复习(预习)了一下线性代数,趁着没忘赶紧做一下笔记。
DICOM 中与方位计算有关的 Tag
在开始之前,有必要先了解一下DICOM中与图像方位计算有关的几个Tag,主要有3个。
| Tag | Keyword |
|---|---|
| (0020,0032) | Image Position (Patient) |
| (0020,0037) | Image Orientation (Patient) |
其中Image Position指的是图像左上角的像素在患者坐标系中的位置。 Image Orientation由6个数字组成,分别是图像的行(Row)方向和列(Column)方向的单位向量与x/y/z坐标轴夹角的余弦值(cosine)。
有了上面两个Tag的值,就可以计算出图像在空间坐标系中的位置和方位了。
计算法向量
现在我们已经有了图像平面上两个垂直的向量,行和列方向的向量,使用行列式就能计算出图像所在平面的法向量了。
$$u × v = \left[\begin{matrix} i & j & k \\ u_1 & u_2 & u_3 \\ v_1 & v_2 & v_3 \end{matrix}\right]$$
具体怎么算,可以看这里,讲得很详细。
代码:
| |
其中orientation就是Image Orientation中的6个值。计算得到的normal就是图像所在平面的法向量的单位向量。
图像方位矩阵
在3D图形变换中经常使用的是4维矩阵,把图像的位置信息也放到矩阵中,可以方便的进行位置变换的计算。
这里分别用u,v,w表示图像的行/列/法线方向向量,S代表图像位置。
$$u=(u_1,u_2,u_3)$$ $$v=(v_1,v_2,v_3)$$ $$w=(w_1,w_2,w_3)$$ $$S=(s_x,s_y,s_z)$$
4维矩阵则表示为
$$matrix=\left[\begin{matrix} u_1 & v_1 & w_1 & s_x \\ u_2 & v_2 & w_2 & s_y \\ u_3 & v_3 & w_3 & s_z \\ 0 & 0 & 0 & 1 \end{matrix}\right]$$
图像旋转
先来看特殊情况下的旋转,即矩阵绕坐标轴的旋转。T为变换矩阵。
绕X轴旋转
$$T=\left[\begin{matrix} 1 & 0 & 0 & 0 \\ 0 & cos\theta & -sin\theta & 0 \\ 0 & sin\theta & cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{matrix}\right]$$
绕Y轴旋转
$$T=\left[\begin{matrix} cos\theta & 0 & sin\theta & 0 \\ 0 & 1 & 0 & 0 \\ -sin\theta & 0 & cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{matrix}\right]$$
绕Z轴旋转
$$T=\left[\begin{matrix} cos\theta & -sin\theta & 0 & 0 \\ sin\theta & cos\theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{matrix}\right]$$
直接用$matrix \times T$就可以得到旋转后的矩阵了。
但是图像旋转并不一定是绕坐标轴旋转,这里说图像旋转指的是在图像所在平面上的旋转,即图像矩阵绕法线旋转一定角度,不存在其它情况,所以需要一种更加通用的计算方法。角度的正负按右手定则决定。
经测试,下面的方法并不通用,下面的旋转矩阵适用于点位置的变换,不适用于DICOM中的方位变换
这里直接给出结果,图像矩阵绕向量$(u,v,w)$旋转$\theta$的变换矩阵T。
$$T=\left[\begin{matrix} u^2+(1-u^2)cos\theta & u v(1-cos\theta)-w sin\theta & u w(1-cos\theta)+v sin\theta & 0 \\ u v(1-cos\theta)+w sin\theta & v^2+(1-v^2)cos\theta & v w(1-cos\theta)-u sin\theta & 0 \\ u w(1-cos\theta)-v sin\theta & v w(1-cos\theta)+u sin\theta & w^2+(1-w^2)cos\theta & 0 \\ 0 & 0 & 0 & 1 \end{matrix}\right]$$
代码示例:
这里用到了MatrixD,主要是用于矩阵的运算。
这里其实是我想的复杂了,DICOM图像旋转的本质就是两个方向向量的旋转,只需要将两个方向向量绕法向量旋转即可。而这一切fo-dicom都已经为我们做好了。
| |
实现起来很简单,浏览Pitch的源码就会发现,其实就是将两个向量绕Right向量(即法向量)旋转,得到新的Forward和Down就是旋转后图像的方位信息。
这里借一张图来说明问题:
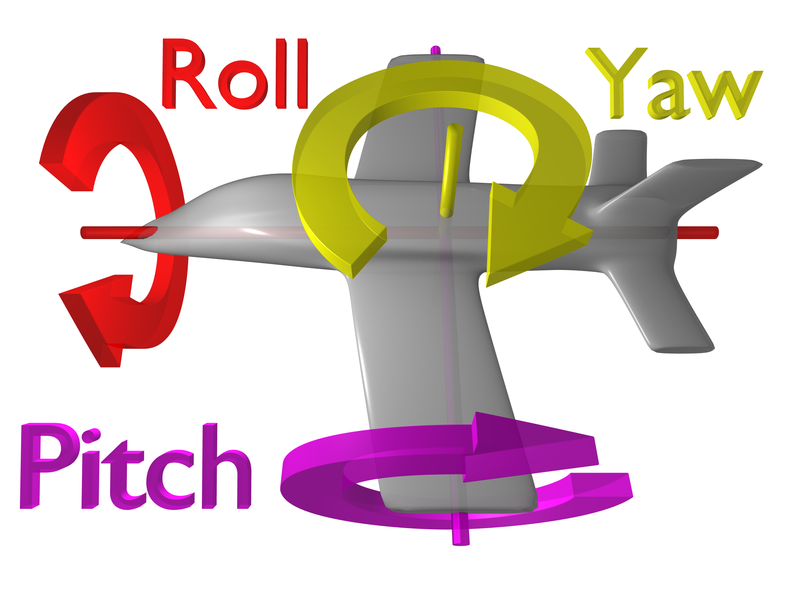
在创建Orientation3D时的参数Forward和Down就是图像的行方向和列方向的方向向量,Pitch方法将Forward和Down向量旋转一个角度,得到的就是旋转后图像的行和列的方向向量。
图像翻转
翻转后的方位计算则比较简单,如果是水平翻转,只需要将水平(Row)方向的向量反向即可,竖直翻转将竖直(Column)方向的向量反向即可。
向量反向只需要将 (u,v,w) 3个值前面添加负号即可。
| |
不过,像这么奇葩的功能应该不会有人去用吧。
注意
对图像矩阵进行旋转或者翻转操作之后,由于图像左上角的像素已经发生变化,所以原有的位置信息也已经改变,需要重新计算才能保证图像在空间中处于正确的位置。对于图像翻转来说或许能够轻易计算出来,不过旋转之后的图像却比较难计算了。
最后,附上一段计算图像方位的代码:
| |
这里用到了Vector3D,表示一个3维向量,可以使用数组代替。
参考